Results related to work by Dr. Thilina Nuwan Weerasinghe within the SFI Offshore Mechatronics has recently been featured in a news story published in Inside Telecom (in Norwegian language and only available to subscribers).
The news article explain how the research adresses performance issues in the 5G network. The expected massive increase in the number of connected devices requires new approaches. The grant-free method proposed in the research is in particular suited to grant access to devices with limited data transfer needs.
Research projects often involve the need for some software development and data processing. The challenge is that often, in order to run and use the software, a lot of libraries and dependencies are required. One solution to this problem is to use containers (e.g. using Docker) which can be built using a declarative description of everything needed to run the software.
A team of researchers at various universities working with software and data science has published a paper titled “Ten Simple Rules for Writing Dockerfiles for Reproducible Data Science”. Consider to build a container and follow these rules next time you create some software related to a research project. This will ensure that if you need to pick up your own software down the line or you want to share it with someone, it should be up and running again in no time.
Mohit Bhola started his work as a PostDoc at Aalborg University May 2022. He will work within WP1.8 with topics related to energy efficient offshore hydraulic systems with focus on digital valve technology and AI. Prior to starting at AAU, Mohit did his PhD at Indian Institute of Technology (Indian School of Mines), Dhanbad.
Student projects at bachelor and master level is an excellent opportunity to explore new ideas and experiment with new technologies. The students select their projects during the autumn in 2022 and the project is carried out in the first half of 2023.
The project proposal submission deadline is in October (mid/ultimo), which means that the planning and project descriptions should start now. Be aware that there is usually more proposals than students so there is no guarantee that your project proposal will be picked.
In 2022 a total of 22 student projects were carried out at University of Aalborg, RWTH Achen, NTNU and University of Agder and with topics related to SFI Offshore Mechatronics. Topics include robotics, motion compensation, 3D and machine vision, remote operation, machine learning, control systems and more.
The various universities have their own systems and procedures on how to submit the proposals. If you need assistance get in touch.
The title of the thesis is “Effects of Time Integration and Constraint Methods for Cable Simulations using ALE-ANCF Elements regarding Real-Time Analysis” and the title of the trial lecture is “Inverse methods: load estimation using digital twin simulations”.
The work has been part of WP4.3. More details and information on how to participate is avaliable here.
WP5.3 Shaun Falconer, June 28th
The title of the thesis is “Condition monitoring of fibre ropes using machine learning”.
The work has been part of WP 5.3. More details and information on how to participate is available here.
The reference group meetings are a great opportunity to disseminate results, to participate in discussions and to get valuable feedback from an industrial perspective. The reference group meetings are internal and exclusive to the industry partners.
Upcoming meetings:
WP5: 16. June, hosted digital WP6: 23. June, hosted digital (postponed to 6. September)
The reference group members are invited via the groups in ProjectPlace. Remember to share internally in your organisation in case other people not on the list should join.
After two years of postponements and cancellations, we finally managed to proceed with our annual conference. The conference was hosted as a physical conference with almost 40 attendees and with good representation from the industry partners and the centre board members. The conference venue was the Department of Energy at Aalborg University.
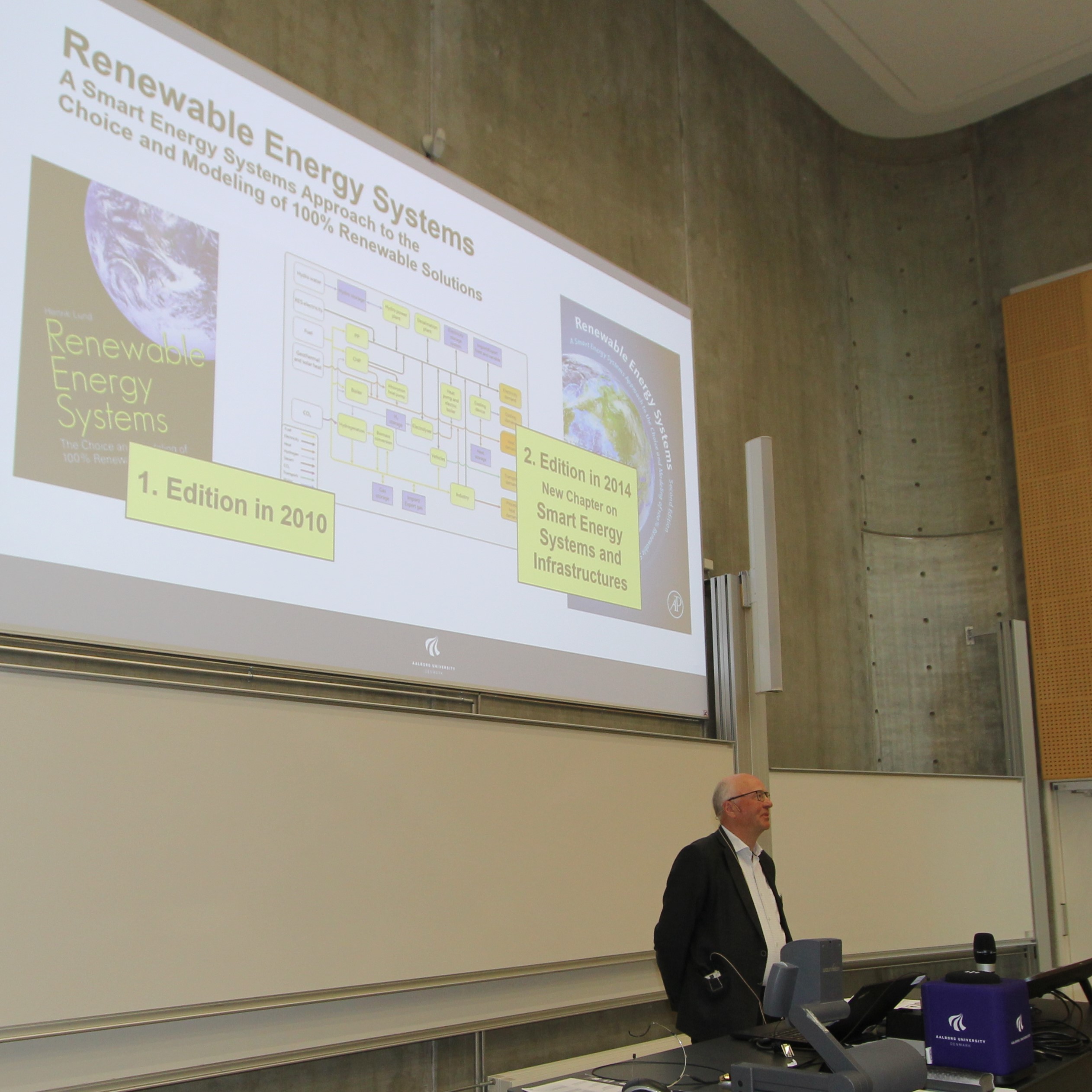
Most of the attendees started the journey in Grimstad or Kristiansand early morning Thursday travelling by ferry to Hirtshals Denmark and from there to University of Aalborg. The conference program started 13:00 on Thursday 19. with invited keynote speaker Professor Henrik Lund, which gave an inspiring talk about energy systems and future outlooks.
During Thursday WP1 (Torben Andersen & Morten Kjeld Ebbesen), WP5 (Rune Schlanbusch) and WP6 (Baltasar Beferull) had their presentations and summaries of completed project. In each WP the active projects were presented by the PhD candidates. Due to the period with the pandemic, for some of the PhDs this was their first opportunity to present at a conference to a live audience.
The conference program finished off with a inspiring talk from chair of the board Tom Fidjeland and plenary discussions involving all the attendees. The day was rounded off with an excellent meal and surroundings at Mortens Kro, Aalborg.
The following day started early with presentations including summaries of completed projects from WP2 and WP4 (Olav Egeland) followed by WP3 (Jing Zhou). In each WP the active projects were presented by the PhD candidates.
The keynote of the day was delivered by Associate Professor Mohsen N. Soltani presenting research from Aalborg University, campus Esbjerg.
The day was rounded off with group session break-out discussing how the SFI Offshore Mechatronics have delivered so far, contributions to the UN sustainable development goals and how the results and expertise can be utilized in new projects, including how it fits with global needs and future outlooks. After a long day most of the attendees returned from Aalborg to Hirtshals and arrived in Kristiansand just after midnight.
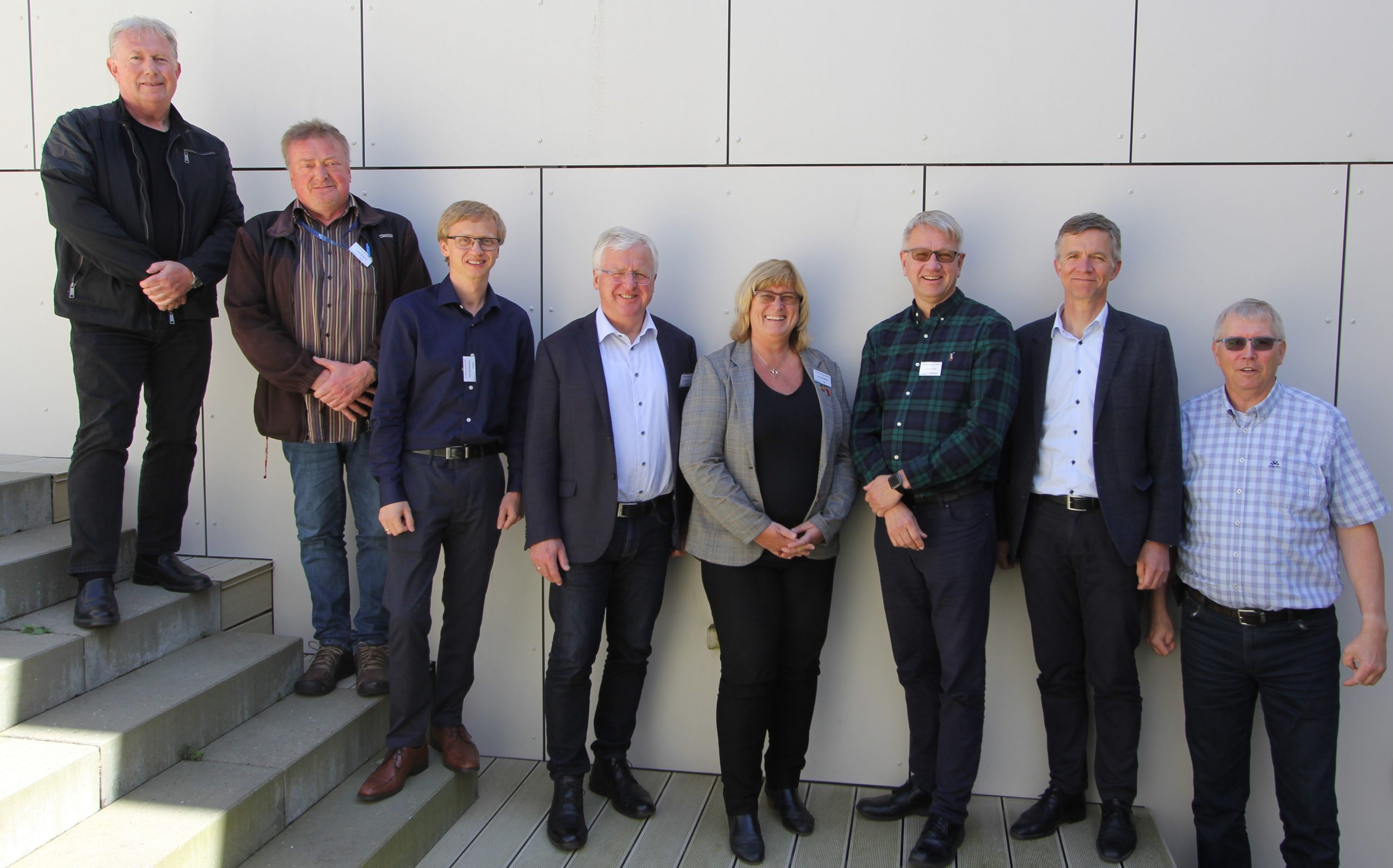
We also used the opportunity to get some up-to-date pictures of the board, work package leaders.
The SFI Offshore Mechatronics board members and centre director in the period 2021-2023. Sjur-Henning Hollekim (HMH), Torben Andersen (Aalborg University), Rune Schlanbusch (NORCE), Olav Egeland (NTNU), Jorunn Gislefoss (UiA), Tom Fidjeland (GCE Node, chair of the board), Peder Sletferding (NOV), Geir Grasmo (UiA, Centre Director). Board member, Anstein Jorud (Cameron Sense) is not in the picture.Work-Package leaders, Torben Andersen (WP1), Morten Kjeld Ebbesen (WP1), Olav Egeland (WP2 & WP4), Jing Zhou (WP3), Rune Schlanbusch (WP5), Baltasar Beferull (WP6), Ellen Nordgård Hansen (WP7, in-place of Christian van der Ohe which was not able to attend)
Thanks to all the attendees for their contribution during the conference and a big thanks to Torben, Tina and Bonnie for welcoming us and taking care of us during the conference and stay in Aalborg.
All the presentations have been uploaded to ProjectPlace (for members only).
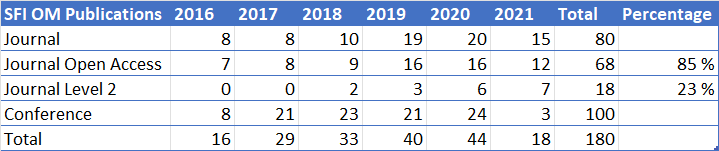
All publication are registered for reporting purposes and also cited on this website. A compilation of all publiations is published annually. Recently all the publication pages have been updated with a direct link to the full-text publication. Link to full text i labeled as either OA = Open Access or PP = ProjectPlace for consortium partners only. A summary with annual statistics is also added to the publication pages. You can find the respective publication pages here: 2016, 2017, 2018, 2019, 2020, 2021, 2022 (ytd).
An aggregation of the annual summaries gives the following statistics:
Even if a publication is not accessible via a journal publisher or conference proceeding, sometimes a pre-print of a publication is published in other sources such as Academia, Researchgate or Arxiv. To search for an open access version of a publication the following service can be used: https://openaccessbutton.org.
The registration closes April 1st. The conference is open to all partners in the consortium. Please register your attendance as soon as possible.
We have booked a group travel for the group traveling from Grimstad/Kristiansand. Attendees traveling from Trondheim or other parts of Norway are also welcome to join the Agder group. The tickets for the transportation including tickets for the ferry will be booked as a group (those of you who have checked off this option in the registration form will receive some more details next week).
Please note that everyone attending must book and pay for their own accomodation. Rooms are reserved at “Slotshotellet” (https://slotshotellet.dk). Use booking code 12014286 when you book the room.
Get in touch with Asle Pedersen (asle.pedersen@uia.no) in case you have questions.
Final version of the programme:
SFI-OM Annual Conference 2022
Thursday 19/5 ⠀⠀⠀⠀⠀⠀
11.45 – 12:45
Registration and Lunch/Sandwich at AAU
12:45 – 13:00
Welcome, Introduction
13:00 – 13:40
Keynote 1, Smart Renewable Energy Systems and a fully Decarbonized Society: Professor Henrik Lund, Department of Planning, AAU
13:40 – 14:00
WP1 Drives: Summary of Completed Projects: Torben Ole Andersen, AAU and Morten Kjeld Ebbesen, UiA.
14:00 – 14:20
WP1.6 Energy Efficient Offshore Hydraulic Systems with focus on linear Actuation: Wei Zhao
14:20 – 14:40
WP1.7 Energy Efficient Offshore Hydraulic Systems with focus on rotary Actuation: Thomas Farsakoglou
14:40 – 15:00
Coffee break
15:00 – 15:20
WP5 Monitoring Techniques: Summary of Completed Projects: Rune Schlanbusch, NORCE
15:20 – 15:40
WP5.4 Condition-based lifetime prediction as result of calculated component loads: Mohamed Yousri
15:40 – 16:00
WP5.6 Acoustic emission testing of hydraulic cylinders: Dr. Vignesh V. Shanbhag
16:00 – 16:20
WP6 Data Analytics, IT Integration and Big Data. Summary of Completed Projects: Baltasar Beferull Lozano, UiA
16:20 – 16:40
WP6.2 Novel methods for context-aware data reduction of multiple dependent time-series: Emilio Ruiz
16:40 – 17:00
WP6.3 Design of soft-sensors based on novel context-aware data fusion techniques: Kevin Roy
17:00 – 17:15
Coffee Break
17:15 – 18:00
Keynote2, Industrial Challenges: Chair of the board, SFI Offshore Mechatronics, Tom Fidjeland, CEO, GCE Node
18:00 – 18:30
Day 1 WP Plenary Discussion: Future directions and continued collaboration