The two judges next to the UiA Drillbotics machine on May 26, 2016. From left: Tor Inge Waag from MHWirth (Kristiansand) and Mike Herbert from ConocoPhillips (Stavanger).
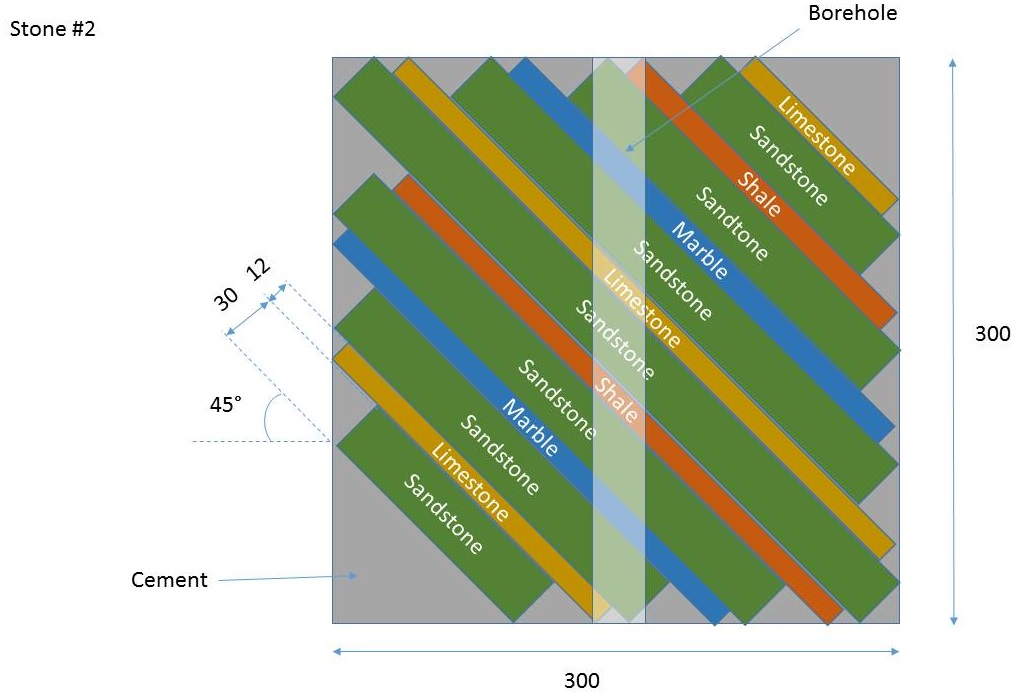
The stone used in the competition consists of several layers of different material (marble, sandstone, shale and limestone) angled at 45 degrees, see the picture below.
A video of the UiA Drillbotics machine can be seen at: https://www.youtube.com/watch?v=xWsLnP22lwU
Below is the jury’s evaluation:
Firstly we would like to thank everyone who has been involved in this competition. We were both very impressed by both teams, with their efforts and results!
General comments:
UIA:
- Very professional and solid, well-built industrial prototype that actually worked.
- HSE well covered
- Well thought out in terms of construction/design, good electrical setup, and it worked, though indication of poor control during the short drilling test.
- Good thinking with automatic optimization of ROP based on varying WOB and RPM
- Large vibrations were indicated and the control of this seemed very coarse, and we were not sure if the rack and pinion setup also influenced the vibrations seen.
- Novel to see the use of 3D printing to fast track components was good.
- The use of the system for future use adding more sensors etc. had been thought through.
- Data management seemed poor the impression was that data was not collected and stored in a data base for retrieval and learning/optimization.
- The fluid rates seem very low..not sure how that was optimized.
- HMI looked good
- Kept within Budget
- Had thought about mobility, and the rig showed good promise
- Disappointed that they did not look at down-hole sensors, though this was seen as phase two.
UIS:
- UIS had a smaller team which we think limited their progress, presentation was rather hurried and one appeared made at the last minute, with lots of abbreviations which were not fully defined. Much more focus on the math and physics, and the use of the data to optimize.
- Construction looked a lot less study and it would be interesting how it handles drilling vibration.
- In terms of HSE there were too many open electrical boxes and loose wiring, and apparently no end stops, just an emergency shutdown.
- Good use of heavy BHA to help avoid buckling.
- Novel handling of the combination of gravity + centrifugal + Coriolis + Euler forces from downhole sensors including noise filtering.
- Had good flow regimes, and seemed to have precise control
- Had good alarm setups in software, though GUI /HMI is much more focused at engineers.
- Well thought out time response strategy for shutdown of top drive.
- Apparently had a self-calibrating system
- Excellent that they have been looking at the use of downhole sensors, which allowed some form of directional control
- Unfortunately over budget and they could not show the machine in operation.
- It was apparent that the late change in the drill-pipe size effected UiS more because of processor choice.
In Summary:
In summary we have to award it to UiA as they demonstrated the machine, as requested, though they did have some limitations and described above. UiS had good focus on the control and data management and less on the design aspects, though what they have achieved is more than good enough for the task. UiS more clearly Petroleum focused, whilst the UiA ended up with the best rig which was clearly very movable.
As we did not see the the UiS rig in operation, we would still like to see it in motion at a future date!
One main thing is that this is an excellent initiative and should continue, as Norway should continue to have a leading position in Automation and Autonomy in Drilling, and we need the ideas and support from Academia.
Best Regards
Mike Herbert / Tor Inge Waag





