The SFI Offshore Mechatronics Final Report is available for download here (2.3mb). A version with full appendixes is available here (2.3mb) and a high resolution is available here (18mb).
The registration ended on June 12th. During the last day of the conference we will disseminate highlights from the center after 8 years in operation. We also have some invited external keynote speakers on the program on the last day. Prof. Sebastian Trimpe, Institute for Data Science in Mechanical Engineering, RWTH Achen University will give an introduction to learning based approaches for dynamical systems and control*. Elling Rishoff, Senior Vice President DNV Incubation, will talk about digitalization challenges in the offshore industries.
Program and registration full two-day conference:
Program and registration open day (21/6):
We are looking forward to to seeing you!
*Background on the topic learning for dynamics and control
“The explosion of real-time data that is emerging from the physical world requires a rapprochement of areas such as machine learning, control theory, and optimization. While control theory has been firmly rooted in the tradition of model-based design, the availability and scale of data (both temporal and spatial) will require rethinking the foundations of our discipline. From a machine learning perspective, one of the main challenges going forward is to go beyond pattern recognition and address problems in data-driven control and optimization of dynamical processes.” L4DC.org

Reduced costs and increased productivity without compromising health, safety and environmental requirements is critical for sustainable and competitive offshore operations. Maintenance and repair strategies have an impact on machine availability and reliability, which in turn have an impact on costs and productivity.
In the traditional periodic maintenance strategy, the risk is that machines are maintained too early or too often, resulting in elevated costs, or too late resulting in unplanned downtime. This has motivated the offshore industry to new maintenance strategies such as condition-based maintenance, predictive maintenance, preventive maintenance, risk-based maintenance, and resilience-based maintenance or to put it simply – smarter maintenance.
However, 24/7 operation in the remote and harsh conditions of the offshore environment is a demanding business. Any planned downtime must be carefully considered and unplanned downtime hampering operations leads to potentially high production losses. A resilient maintenance strategy may also factor in contract and market conditions such as penalties, price fluctuations, cost and availability of spare parts, skilled personnel, and infrastructure such as vessels and cranes.
Machine health and the need for maintenance is impacted by multiple factors, including machine usage and operating conditions such as loads and weather conditions. Another challenge is that wear issues can be hard to identify by visual inspection and would in most cases require downtime due to the need for disassembly to access components and parts. But what if we could identify problems at a very initial stage, in time to operate the machine securely and reliably until the next feasible maintenance opportunity?
This is the type of question addressed by the SFI Offshore Mechatronics work-package on condition monitoring techniques (WP5). Based on feedback from the industry partners, condition monitoring of hydraulic cylinders was identified as a relevant research topic. Hydraulic cylinders are used in a broad range of machines in the offshore industry, such as clamping units, skidding systems, tensioners, cranes, and heave compensation. Robust and affordable solutions for condition monitoring of hydraulic cylinders would therefore be of high value.
Monitoring of rotating machinery such as electrical motors, pumps and gearboxes is commonly solved by bolting vibration sensors on the machine. The vibration data is recorded, and once analyzed it can indicate if maintenance is needed. A drawback of vibration sensors is that they are not performing well with non-rotating machinery such as hydraulic and electro-mechanical cylinders and reciprocal machines using pistons to induce motion. But what type of sensor would be a good fit for monitoring cylinders?
For a moment, let us go back to the very early start of the SFI Offshore Mechatronics. In 2015, Senior Researcher Rune Schlanbusch started his research on monitoring of large diameter steel ropes and welds using Acoustic Emission (AE). At the same time, but on the opposite side of the world, Vignesh Shanbhag started his PhD at Deakin University, Australia. Vignesh used AE techniques in his research on measuring tool wear in metal forming processes. An advantage of AE-based condition monitoring is that AE signals are sensitive to damage on microscopic level. Another advantage is that the effect of environmental noise or machine vibrations are severely limited for AE-signals due to the high frequency.
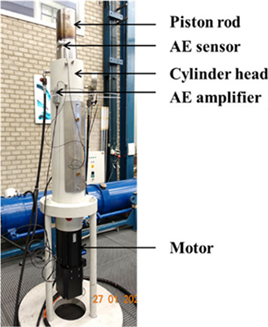
Subtask WP5.6 was established with the aim of using AE to identify oil leakage from hydraulic cylinders at very initial stages. Vignesh Shanbhag was recruited into WP5.6 as a PostDoc researcher at NORCE Research under supervision of Rune Schlanbusch, and he started his work in late 2019. Specific wear conditions such as piston rod wear, spindle wear and seal-wear were considered. The scientific results of the performed research on hydraulic cylinders and spindles are published in several journal papers, a majority on the highest scientific level (Level 2).
In his research Vignesh Shanbhag presents robust AE-based condition monitoring techniques, that can be used in industries to monitor multiple faults in hydraulic cylinders at the same time.
The results have been presented to the industry partners, but development of sensor systems is not in their core business. They are foremost users of such systems and rely on vendors to supply commercial products and services. Non-technical barriers such as business models and lack of incentives are also part of the consideration.
The technology demonstrated in the research is well positioned within emerging trends such as digital vessel classification services, asset integrity management, asset performance management and digital twins. However, the sensor system used in this research is bulky and expensive lab equipment (Technology Readiness Level – TRL 3-4). To be considered for larger investments and industrial implementation TRL 7-9 is expected.
For these reasons, NORCE has decided to proceed with a separate spin-off project to reach a higher technology readiness level. In 2021 a pre-project with funding from the Research Council Norway FORNY program was granted. In early 2023 a FORNY main project with 5MNOK funding was granted. The project will prepare for commercialization of the AE technology. A spin-off company to industrialize and bring the technology to the market will be considered as part of this process.
More details on the research results can be found in the publication “Defining acoustic emission-based condition monitoring indicators for monitoring piston rod seal and bearing wear in hydraulic cylinders” [1].
[1] Shanbhag, V. V., T. J. J. Meyer, L. W. Caspers and R. Schlanbusch (2021). Defining acoustic emission-based condition monitoring indicators for monitoring piston rod seal and bearing wear in hydraulic cylinders. The International Journal of Advanced Manufacturing Technology.
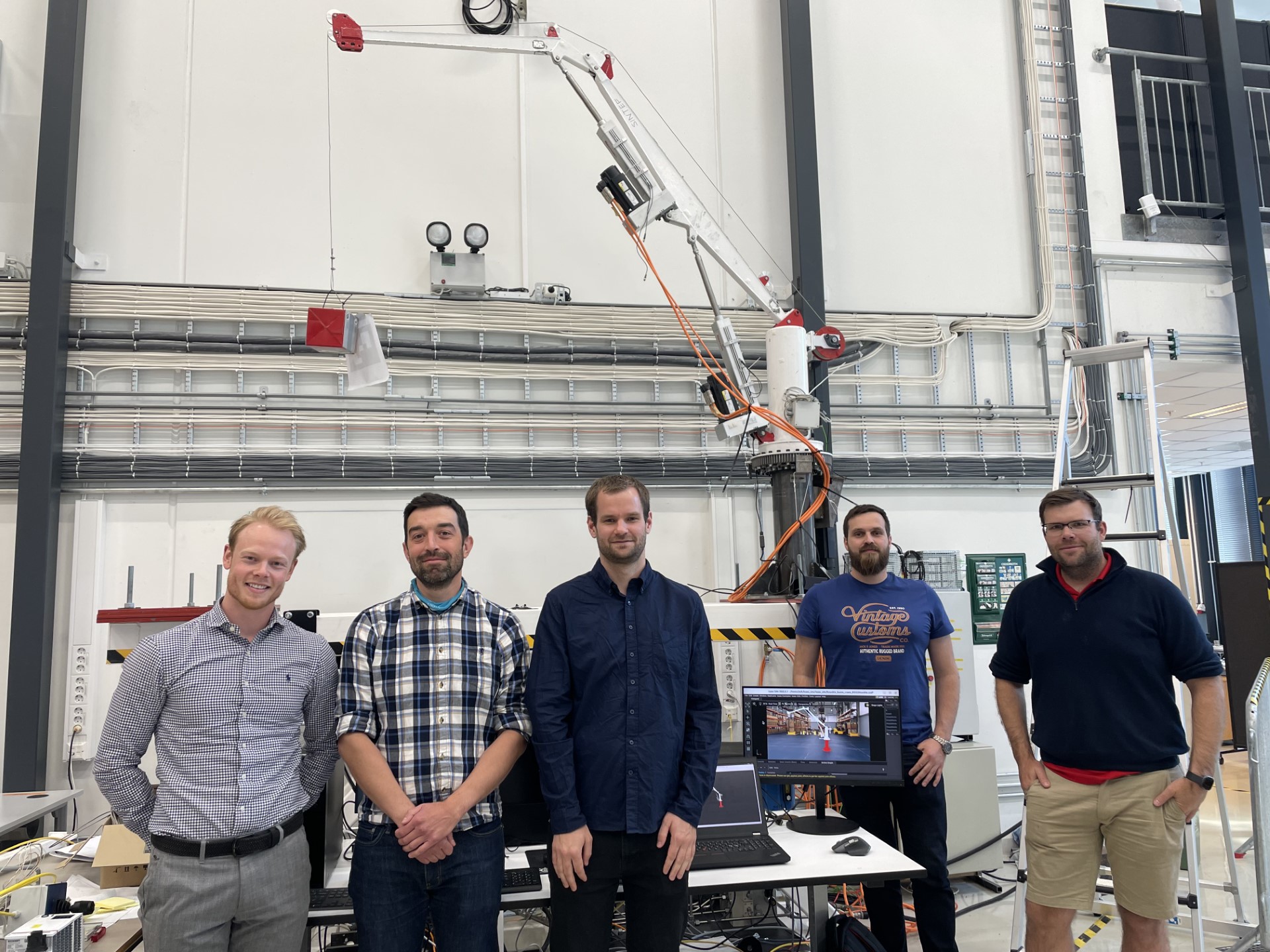
From left: Alexander Sterk Hansen, Andrej Cibicik, Kristian Gaarder Rakvåg, Bjørn Håvard Halvorsen, Saghaug, Daniel Hagen.
Every year, on average 20 master thesis projects affiliated with SFI Offshore Mechatronics are delivered at University of Agder (UiA), NTNU, Aalborg University (AAU) and RWTH Achen. We anticipate reaching a total of 160 master thesis projects in the period 2016-2023.
This spring, two master thesis projects at University of Agder also resulted in a gathering of SFI Offshore Mechatronics Alumni. Andrej Cibicik finished his PhD at NTNU and WP2 in 2020 and is now a Research Scientist at Sintef Manufacturing. While working with his PhD he was also active in the design and development of a crane for testing and research purposes related to motion compensation.
The crane has since been moved to the mechatronics engineering lab at UiA where Alumni Daniel Hagen has managed the modification and further development of the crane. Daniel finished his PhD in WP1 of SFI Offshore Mechatronics in 2020 and now holds a position as an Associate Professor at UiA.
Daniel and Andrej have extended their collaboration beyond the SFI project. Together with Associate Professor Muhammad Faisal Aftab at UiA, Andrej, Daniel have supervised two master thesis projects related to the modification and further development of the crane as well as the design and development of a new electric winch system.
The crane is now mounted on the new 1DOF motion platform. The crane is modified with a new control system (Beckhoff) which is integrated with the motion platform, enabling testing control systems for autonomous offshore operations. The 1DOF motion platform provides an excellent playground to test and experiment before eventually moving on to testing on the 6DOF steward platforms in the lab.
Model-based Design of a Winch System for a Downscaled Motion Compensated Knuckle Boom Crane
(Kristian Gaarder Rakvåg)
Towards Autonomous Offshore Mechatronics Systems: Development of a Digital Twin Framework
(Alexander Sterk Hansen and Bjørn Håvard Halvorsen Saghaug)
Congratulation to the students for the delivery of the thesis and finishing their masters degree! We expect more master thesis projects related to the crane and motion platform in years to come.

The journal MIC will organise the 6th special edition on offshore technology within the fields of Modeling, Identification and Control.
The fields of primary emphasis by MIC are:
• Modeling: General methodology of modeling including choice of structure, model reduction, numerical aspects, systems for computer aided modeling, etc.
• Identification: General methodology including system structure, identifiability, convergence, numerical aspects, systems for computer aided identification, etc.
• Control: General methodology including system specification, derivation of control strategies, analysis of system properties such as stability, sensitivity, etc.
• Applications: Demonstration, by simulations or experiments, of applications of theory within the above fields to engineering, biological, economic, ecological, social, geophysical, agricultural systems and others.
All papers published in MIC are peer-reviewed. All papers will receive a permanent DOI number and a printed edition will be handed out at the conference. MIC counts as publication level 1 in Norway.
Guest editors in this edition are Daniel Hagen (former PhD fellow in SFI Offshore Mechatronics) and Asle Pedersen (SFI Offshore Mechatronics).
Submit papers to: asle.pedersen@uia.no, daniel.hagen@uia.no with a cc to: editor@mic-journal.no. If you intend to submit, please let us know as soon as possible with a short description of the topic. This will be helpful in the planning of the review process. The submission deadline is August 31, 2023. Manuscripts must be prepared using the MIC template available at https://www.mic-journal.no/for-authors/

The paper “Embedding Clustering using Lightweight Contrastive Learning For Cross-Modal Classification” was awarded with Best Student Paper Award at the The 8th International Conference on Computer and Communication Systems (ICCCS 2023). The event took place on April 21-24, 2023 in Guangzhou, China.
The first author of the publication is José Amendola, which is doing his PhD at University of Agder as part of WP3 in SFI Offshore Mechatronics. The publication co-authors are Linga Reddy Cenkeramaddi and Ajit Jha.
Congratulations to José and his co-authors on this achievement.

You are invited to this innovation workshop initiated by NORCE Norwegian Research Centre, SFI Offshore Mechatronics and SFI Smart Ocean and GCE NODE and GCE Ocean Technology. The workshop will explore ocean technologies that will form the basis for future needs within operation and maintenance in the offshore, marine and maritime sectors.
SFI Offshore Mechatronics are now in its ending phase while SFI Smart Ocean is still in its startup phase. These two SFIs have overlapping and adjacent thematic areas which is relevant for the evolving offshore renewable energy sector and ocean farming. Common possibilities relevant for the industry will be approached in the workshop.
Who is the workshop intended for?
The workshop is relevant for everyone working in offshore, marine, and maritime sectors. It is especially for those who design, service or operate systems related to monitoring, performance tracking and decision support.
What is the goal of this workshop?
The goal is to create an arena where stakeholders from different regions and along the value chains within offshore, marine, and maritime industries meet to discuss common challenges and opportunities. Through sharing our perspectives and outcomes of the SFI we believe we will gain an insightful and genuine innovation processes.
The program contains selected inspirational talks from academia and industry, and a workshop element where the participants will suggest and develop their ideas in collaboration. The organizers are open for coordinating efforts originating from the workshop to initiate cooperation for further developing selected prominent topics.
When and where?
24th of August 2023
09:15 – 15:45
Kreativt Møtesenter
Ground floor at Terje Løvås vei 1, Grimstad
Program
| 08:45 – 09:15 | Registration and coffee |
| 09:15 – 09:20 | Welcome by SFI Offshore Mechatronics Centre Director Geir Grasmo, UiA |
| 09:20 – 09:35 | Condition monitoring in offshore mechatronics (Rune Schlanbusch, Senior Researcher, NORCE) |
| 09:35 – 09:50 | Data analytics, IT integration and big data (Professor Baltasar Beferull, UiA) |
| 09:50 – 09:55 | Introduction of SFI Smart Ocean (Ingvar Henne, Centre Director, UiB) |
| 09:55 – 10:10 | Technology and applications for acoustic positioning and communication systems (Erik Bjerke, Kongsberg Maritime) |
| 10:10 – 10:25 | New sensor technology development in SFI Smart Ocean (Peter James Thomas, Chief Scientist, NORCE) |
| 10:25 – 10:50 | Break |
| 10:50 – 11:10 | Digitalization for operation and maintenance (Kelvin Sundli, Technical Program Manager, Product Strategy, Cognite) |
| 11:00 – 11:15 | Steinharde beslutninger er gull verd – kjerneboring på 4000 meters dyp (Andreas Svanlund, Business Developer, Seabed Solutions) |
| 11:15 – 11:35 | The digital future in aquaculture: opportunities and challenges (Lars Ebbesson, Research Professor, NORCE) |
| 11:35 – 12:30 | Lunch |
| 12:30 – 13:30 | Innovation workshop Part 1 by GCE NODE |
| 13:30 – 14:00 | Break |
| 14:00 – 14:50 | Innovation workshop Part 2 by GCE NODE |
| 14:50 – 15:30 | Presentation of ideas and plenum discussion |
| 15:30 – 15:45 | Wrap up |
The SFI Offshore Mechatronics Annual and Final Conference will take place on June 20.-21 at UiA, campus Grimstad. The first day of the conference is for the consortium members only. The last day of the conference is also opened up to external participants. Use this registration form to sign up for the open day conference program on June 21.
| Wednesday 21/6 | Open Day – Preliminary Program |
| 08:30 – 09:00 | Registration |
| 09.00 – 09.10 | Welcome & introduction Geir Grasmo (Center Director), Tom Fidjeland (Chair of the Board) |
| 09.10 – 09.40 | Technology Vision in GCE NODE Rune Johnsen, Chair of the Board, GCE NODE |
| 09.40 – 09.50 | Result presentations: WP7 (Technology Vision / Business Model Innovation) Dr. Ellen Nordgård Hansen |
| 09.50 – 10.10 | Mechatronics in SLB; Tomorrow & Today Harald Langenes – Business Domain Expert – SLB Kristiansand (Cameron Sense) |
| 10.10 – 10.30 | Coffee break |
| 10.30 – 11.00 | Result presentations: WP2, WP3, WP4 WP2: Motion Compensation (Thorbjørn Smith, NTNU) WP3: Robotics & Autonomy (Prof. Jing Zhou UiA) WP4: Modeling & Simulation (Prof. Houxiang Zhang NTNU) |
| 11.00 – 11.20 | MacGregor leveraging on SFI Mechatronics Dr. Hugo Rosano, Senior R&D Manager, Offshore Solutions Division |
| 11.30 – 12.15 | Lunch |
| 12.20 – 12.50 | Learning based approaches for dynamical systems and control Prof. Sebastian Trimpe, Institute for Data Science in Mechanical Engineering, RWTH Achen University |
| 12.50 – 13.20 | Result presentations: WP1: Drives (Prof. Torben O. Andersen – AAU) WP5: Monitoring Techniques (Dr. Rune Schlanbusch – NORCE) WP6: Data analytics & Big Data (Prof. Baltasar Beferull Lozano – UiA) |
| 13.20 – 13.50 | Consortium company presentation: HMH (MHWirth) HMH – CBM & Data analytics Nicolai Nilsen, VP Innovation |
| 13.50 – 14.10 | NOV’s achievements as a partner in SFI-Offshore Mechatronics Peder Sletferding, Project Manager New Product Development |
| 14.10-14.30 | Coffee break |
| 14.30-15.00 | Digitalization challenges in the offshore industries Elling Rishoff (Senior Vice President DNV Incubation) |
| 15.00 -15.30 | Industrial Visions Bjarne Skeie (Skeie Group) |
| 15.30-15.50 | SFI Offshore Mechatronics and collaboration Sunniva Whittaker, Rector of UiA |
| 15.50-16.15 | Wrap-up |
| 16.15 | End of Annual Conference 2023 |
| 16:25 | Transport to Airport |
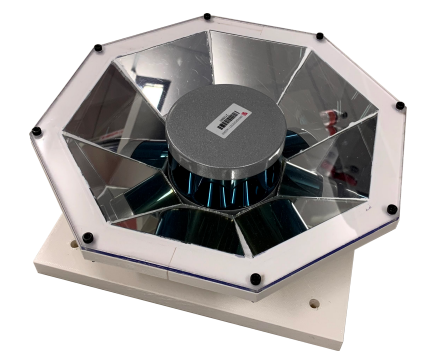
The patent titled “Reflector for reflecting electromagnetic waves from a rotating electromagnetic wave source” has recently been granted as a European patent by the European Patent Organization (EPO). The core of the patented invention is the ability to reshape the field of view from a spinning LiDAR while also maintaining the high resolution and refresh rate. The patented invention is a result of work performed in Work Package 3. The owner of the patent is University of Agder, and the inventors are SFI Offshore Mechatronics alumni Atle Aalerud and Joacim Dybedal.
Light Detection And Ranging (LiDAR) is a type of 3D scanner and uses lasers to measure the distance to and position of objects within a defined Field of View (FOV). The set of 3D point measurements from a 3D scanner can have hundreds of thousands measurements, and is referred to as a point-cloud. For decision support and automation, the point-cloud needs further processing using machine vision algorithms such as object detection and object classification.
The FOV of a spinning LiDAR is typically fixed at 360° horizontally and between 22.5° and 90° vertically. If your application requires omnidirectional 360° horizontal FOV then a spinning LiDAR is a good choice. However, if the applications require less than 360° horizontal FOV, using the spinning LiDAR directly will be inefficient. A portion of the lasers will be directed outside of the target scene and must be discarded. E.g., if only 120° horizontal FOV is desired, then applying a spinning LiDAR would discard 67% of the measurements. The information carried by the discarded measurements will be wasted and the cost of the useful measurements will be very high.
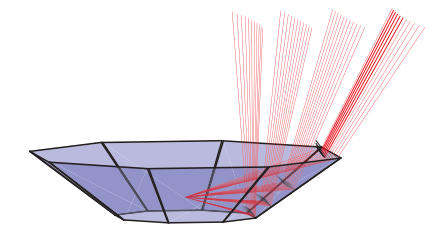
In camera applications the FOV can be easily adjusted optically by pairing an image sensor with an appropriate lens. The patented invention uses a similar approach, wherein a spinning LiDAR is paired with an appropriate reflector matching the desired FOV. By adjusting design parameters such as number of segments and individual tilt angles, the reflector can be configured to maximize point cloud density, maximize coverage, or a combination. In this manner the number of useful measurements can be close to the full resolution of the LiDAR. By narrowing the FOV, the density of the point-cloud increases which in turn can improve the performance of the machine vision algorithms. The invention thus enables increased performance at a lower cost.
The reflector invention is a typical example of technology which is wanted by the industry partners, but development of sensor systems is outside of their core business. They are primarily users of such systems, and rely on vendors to supply commercial products and services. For this reason University of Agder initiated a process to secure IPR rights and exploration into how to commercialize the concept. This process is still ongoing.
A detailed description of the concept and experimental results is available in the publication “Reshaping Field of View and Resolution with Segmented Reflectors: Bridging the Gap Between Rotating and Solid-State LiDARs“.

The SFI Offshore Mechatronics Annual Report 2022 is available for download in high resolution (5.8mb) (temporarily unavailable) and in a compressed lower resolution here (1.4mb)