J1: Thilina N. Weerasinghe, Vicente Casares-Giner, Indika A. M. Balapuwaduge, and Frank Y. Li, “Priority Enabled Grant-Free Access with Dynamic Slot Allocation for Heterogeneous mMTC Traffic in 5G NR Networks,” IEEE Transactions on Communications, accepted Jan. 2021 (Level 2).
J2: Bakht Zaman, Luis Miguel Lopez Ramos, Daniel Romero and Baltasar Beferull-Lozano, Online Topology Identification From Vector Autoregressive Time Series, IEEE Transactions on Signal Processing, vol. 69, pp. 210-225. (Level 2)
J3: Daniel Romero, Siavash Mollaebrahim, Baltasar Beferull-Lozano and César Asensio-Marco, Fast Graph Filters for Decentralized Subspace Projection, IEEE Transactions on Signal Processing, vol. 69, pp. 150-164. (Level 2)
J4: S. Mollaebrahim, B. Beferull-Lozano, “Design of Asymmetric Shift Operators for Efficient Decentralized Subspace Projection” (Accepted), To appear in IEEE Transactions on Signal Processing, 2021
Conference Papers:
C1: Yvonne Murray, David A. Anisi, Martin Sirevåg, Pedro Ribeiro and Rabah Saleh Hagag, “Safety Assurance of a High Voltage Controller for an Industrial Robotic System”, Brazilian Symposium on Formal Methods, SBMF 2020: Formal Methods: Foundations and Applications pp 45-63.
C2: L. M. Lopez, B. Beferull-Lozano, “Online hyperparameter search interleaved with proximal parameter updates”, European Signal Processing Conference (EUSIPCO), 2021.
During Q4-2020 and Q1-2021 SFI Offshore Mechatronics has hosted a be-weekly webinar. We hosted five webinars in Q4-2020 and five in Q1-2021.
During the first period of the webinars, we observed good attendance with an average of 15 attendees. In the last quarter we have seen more variable attendance and a slight decline. To better understand if this is a natural variance or the consequence of the topics of the presentations being less interesting, we have made an anonymous poll. The poll is intended to provide us with feedback on past webinars and preferences for future webinars. For the time being we are pausing the webinars, but we anticipate starting up again in the fall latest.
If you have attended one of our webinars or if you may want to attend a webinar in the future, please spend a few minutes to complete the poll. Your feedback on the previous topics/ presentations and preferences and suggestions for future webinars is highly appreciated. Link to poll.
PhD Defense: March 19 – Lars Ivar Hatledal – NTNU Aalesund
Lars Ivar Hatledal has for his defense of the PhD degree at NTNU, handed in the following thesis:
“Protocols and Standard for Co-Simulation – For demanding maritime operations”
The opponents of the thesis are:
Associate Professor Tiina Komulainen, OsloMet, Norway Professor Agris Nikitenko, Riga Technical University, Latvia Associate Professor Henrique Gaspar, NTNU (Administrator)
The trial lecture took place on March 19, 2021, at 10:15 on the following topic: «Co-simulation toolbox – How to implement co-simulation in an industrial environment».
The actual defense took place on March 19, 2021, at 13:15.
Both the trial lecture and the defense were public.
The main supervisor has been professor Houxiang Zhang at NTNU Aalesund. Co-supervisors have been professor Geir Hovland at the University of Agder and university lektor Arne Styve at NTNU Aalesund.
ABSTRACT: There is a strong demand for innovation and efficiency within operations, life cycle services, and design of maritime systems. Modern vessels operate increasingly autonomously through strongly interacting sub-systems. These systems are dedicated to a specific, primary objective of the vessel or may be part of the general essential ship operations. The sub-systems exchange data and make coordinated operational decisions, ideally without any user interaction. The task of designing, operating, and integrating life cycle services for such vessels is a complex engineering task that requires an efficient development approach, which must consider the mutual interaction between the inherent multi-disciplinary on-board sub-systems. Digitalization thus has become a key aspect of making the maritime industry more innovative, efficient, and fit for future operations.
However, no one simulation tool is suitable for all purposes and the plethora of modeling tools within different disciplines exists for very good reasons. Issues related to integration of heterogeneous systems and hardware, memory, and CPU utilization makes implementing complex-cyber-physical systems, like vessels, in a monolithic or centralized manner undesirable.
Co-simulation alleviates this issue, allowing different sub-systems to be modeled independently, but simulated together. Co-simulation refers to an enabling technique, where different sub-systems making up a global simulation are being modeled and run in a distributed fashion. Each sub-system is a simulator and is broadly defined as a black box capable of exhibiting behavior, consuming inputs, and producing outputs. A crucial point is that it allows users to simulate models exported from different tools in a unified manner. Compared to more traditional monolithic simulations, co-simulation encourages re-usability, model sharing, and fusion of simulation domains.
Co-simulation can be expanded into the realm of digital twins by feeding sensor data measured from the real world into the models, which in turn closes the loop by providing actionable feedback. A digital twin can be defined as a virtual representation of a physical asset enabled through data and simulators for real-time prediction, optimization, monitoring, controlling, and improved decision making. As the digital twin mimics its physical counterpart, it can be used to estimate a vessels performance before running any tests in the real world. This not only offers flexibility, but also cuts down costs to a great extent. These proxies of the physical world will help companies in the maritime industry in developing enhancements to existing products, operations, and services, and can even help drive business innovation.
This dissertation aims to drive adoption of co-simulation standards and development of use-cases by providing software that makes co-simulation simpler and more intuitive. This includes enabling technology for building standard-conforming models and systems, and subsequent tools for simulating them. The case studies presented show the effectiveness of the proposed approach.
From left to right: Co-Supervisor Arne Styve, main supervisor Houxiang Zhang, Dr. Lars Ivar Hatledal who successfully defended his PhD thesis, and Co-Supervisor and centre director of SFI Offshore Mechatronics Geir Hovland.
Software developed in relation to SFI Offshore Mechatronics is maintained in public and private repositories in our Github account. In addition to this, software in also maintained under other accounts. We have now decided to fork these other repositories to make sure they are findable, visible and archived from the SFI Offshore Mechatronics account.
If you are aware of a software developed within the project which is not yet forked please reach out to Asle Pedersen (asle.pedersen@uia.no) so that we can fork it into the project Github account.
Thiago Gabriel Monteiro will defend his PhD-thesis on February 3rd. The title of his thesis is “A Cross-Modal Integrated Sensor Fusion System for Fatigue and Awareness Assessment in Demanding Marine Operations”
The trial lecture will be held at 10:15 of the given theme: «What other models and methods than data driven can be used to study mental fatigue in maritime operations? Discuss the advantages, disadvantages and applicability to maritime operation situations, and describe situations for which the various methods are recommended. Evaluate the strengths and weaknesses of these methods in linking mental fatigue to operator and system performance, and discuss the challenges with internal and external validity of the methods presented».
The public defense will be held at 13:15.
Both the trial lecture and the defense are open for all that are interested. Due to the pandemic situation, this will be done online. You can participate through the link below.
The Research Council of Norway have a new call with relevance for the SFI Offshore Mechatronics industry partners. The grant size is 1-16MNOK per project. The call is open now and closes in mid April. Funding decisions will be made between mid May and end of June.
The Robotlab has been designed and built as part of SFI Offshore Mechatronics and in particular WP3. The robots was donated by ABB as an in-kind contribution in the project.
The following equipment is available in the lab:
6-axis ABB IRB6600-2.55 Robot
6-akse ABB IRB1400-1.44 Robot
Atle Aalerud and Joacim Dybedal actively used the lab and the equipment as part of their Phd work. We are happy to observe that the lab is also an enabler for new projects and initiatives outside of SFI Offshore Mechatronics. Currently UiA researcher Martin Choux is using the Robotlab to test dismantling discarded battery modules (news story in Norwegian only).
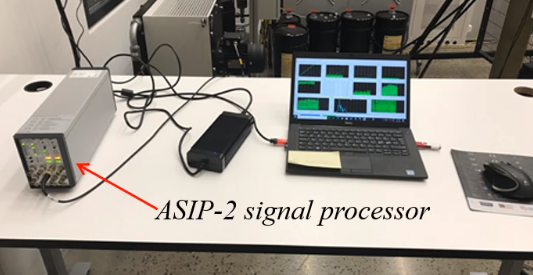
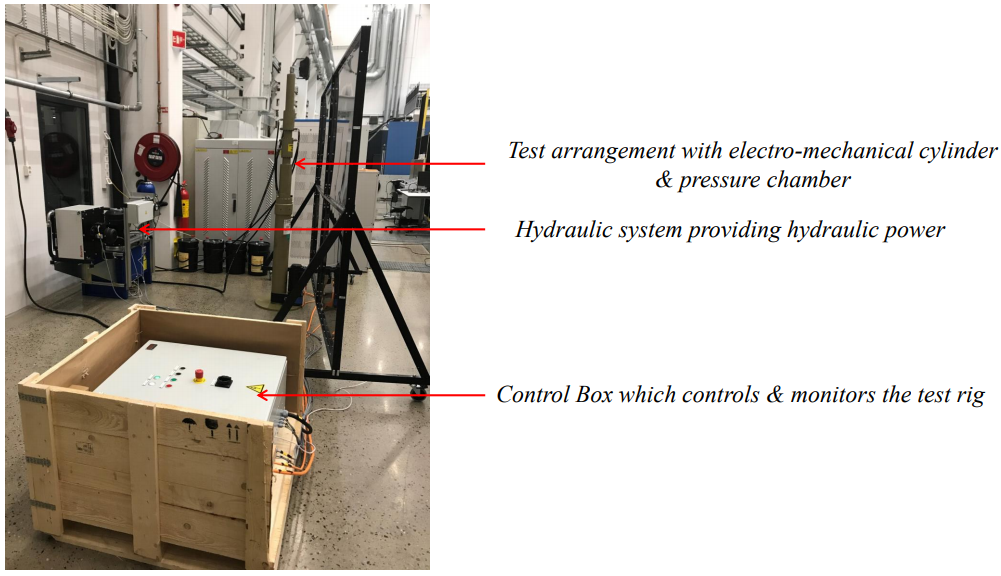
New equipment for acoustic emissions and a seal test rig have been designed and installed in relation to WP5. The acoustic emission equipment consists of an AE sensor, preamplifier and one channel of an ASIP-2 (dual channel acoustic signal processor). With this equipment multiple AE signals and features can be measured. The seal test rig shown in the image below is intended to investigate failure mechanisms, detection methods and remaining useful life prediction of the seals for hydraulic cylinders. The test arrangement consists of a pressure chamber connected to an electromechanical cylinder.
For questions concerning the equipment get in touch with WP5 leader Thomas Meyer.