![]()
Rigid-Body Kinematics is the topic of the first presentation in our webinar series. The topic will be presented by professor Olav Egeland from NTNU and SFI Offshore Mechatronics work-package leader (WP2 & WP4). The presentation will be hosted on Microsoft Teams on October 8th, 12.15-12.45 (CET) Use this link to join.
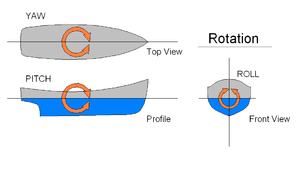
The rotation of a rigid body like a ship, a crane load or a robot gripper can be described with Euler angles, quaternions and rotation matrices. Each of these representations have their advantages and disadvantages depending on the application. In this seminar the basic results for different representations of rotation will be discussed. This will be further developed for applications like estimation of rotation and translation from IMU data, the computation of the average rotation from multiple camera observations, and the calculation of a rotation from vector observations. MATLAB scripts will be made available.