
Title: PhD Research Fellow in Sensor fusion for perception, collision avoidance and navigation towards autonomous systems
Application Deadline: 30th October 2019
JobbNorge ID: 176225
Work-package in the centre: WP3.9
Title: PhD Research Fellow in Sensor fusion for perception, collision avoidance and navigation towards autonomous systems
Application Deadline: 30th October 2019
JobbNorge ID: 176225
Work-package in the centre: WP3.9
See the following link: https://tv.nrk.no/serie/distriktsnyheter-soerlandet/201906/DKSL99061319/avspiller#t=3m34s
See also this link (requires subscription): https://www.tu.no/artikler/slik-skal-yara-birkeland-fortoyes-uten-menneskehender/467835
The Robotics Group at the University of Agder has played a key role in this project, both as part of the SFI Offshore Mechatronics Centre and an additional spin-off project in the BIA program.
Registration for the 5th Annual SFI Offshore Mechatronics conference, June 4-5, can be made here: https://uia.pameldingssystem.no/sfi-offshore-mechatronics-5th-annual-conference-2019
Below is the final program for the 5th Annual Conference of the centre SFI Offshore Mechatronics, taking place in Grimstad on June 4-5, 2019.
Tuesday June 4, Campus Grimstad C2-042:
09:00 – 09:45 Registration + Poster Session
09:45 – 09:55 Welcome, Introduction and Awards
09:55 – 10:25 WP7 / Keynote Speaker 1: Tor Helge Aas, UiA: New digital business models: The case of servitization.
10:25 – 10:40 WP6.2 Context aware data reduction, Emilio Ruiz
10:40 – 10:55 WP6.1&WP6.4 Optimization of energy consumption and emission reduction, Luis M. Lopez
10:55 – 11:15 WP6 Panel Discussion: Baltasar Beferull-Lozano (UiA), Oyvind Mydland (Stepchange), Bjarne Larsen (MHWirth) and Jarle Notland (NOV)
11:15 – 11:30 WP5.1 Tapered big bearings, Martin Hemmer
11:30 – 11:45 WP5.2 Steel ropes, Rune Schlanbusch
11:45 – 12:30 Lunch + Poster Session
12:30 – 12:45 WP5.3 Fiber Ropes, Shaun Falconer and Ellen Nordgård-Hansen
12:45 – 13:00 WP5.4 Condition-based lifetime prediction, Lothar Wöll
13:00 – 13:15 WP5.5 Modeling the fatigue damage mechanism in welded joints, Zbigniew Mikulski
13:15 – 13:35 WP5 Panel Discussion: Thomas Meyer (NORCE), Julian Zec (NOV), Markus Buschmann (MacGregor), Alf-Rune Sørvollen (MHWirth)
13:35 – 14:00 Break + Poster Session
14:00 – 14:15 WP4.1 Integrated simulation of multi-physical systems in offshore operations, Savin Viswanathan
14:15 – 14:30 WP4.2 Component-based simulation systems for drilling automation and crane systems, Njål Tengesdal
14:30 – 14:45 WP4.3 Protocols and standards for integration of simulation models and co-simulation, Lars Ivar Hatledal
14:45 – 15:00 WP4.4 Multi-domain modeling and simulation, Gaute Fotland
15:00 – 15:20 WP4 Panel Discussion: Olav Egeland (NTNU), Christian Holden (NTNU), Houxiang Zhang (NTNU), Ronny Sten (NOV)
15:20 – 15:45 Break + Poster Session
15:45 – 16:00 WP3.1 Development of Offshore 3D Sensor Package, Joacim Dybedal
16:00 – 16:15 WP3.2 Robotic Collision Detection and Avoidance, Atle Aalerud
16:15 – 16:30 WP3.3 Sensor Fusion, Point-Clouds and 3D Maps, Aksel Sveier
16:30 – 16:45 WP3.4 Situational Awareness/Human Factors, Thiago Monteiro
17:00 – Dinner on Campus
Wednesday June 5, Campus Grimstad C2-042:
09:00 – 09:15 WP3.5 5G Communications, Thilina N. Weerasinghe
09:15 – 09:30 WP3.6 Long-reach, light-weight arm intended for use offshore, Dipendra Subedi
09:30 – 09:45 WP3.7 Coupled dynamics between vessel and crane, Ronny Landsverk
09:45 – 10:00 WP3.8 Formal Verification of Autonomous Systems, Yvonne Murray
10:00 – 10:30 Keynote Speaker: Assuring Autonomy, Dr. Mark Nicholson, University of York, UK
10:30 – 10:50 WP3 Panel Discussion: Geir Hovland (UiA), Mark Nicholson (UoY), David Anisi (ABB), Eivind Gimming Stensland (MacGregor)
10:50 – 11:20 Break + Poster Session
11:20 – 11:35 WP2.1 Coupled Dynamics Between Vessel and Crane, Geir Ole Tysse
11:35 – 11:50 WP2.3 Nonlinear friction compensation in motion compensation systems with significant elasticity, Andrej Cibicik
11:50 – 12:45 Lunch + Poster Session
12:45 – 13:00 WP2.4 Vision Systems for Offshore Crane Control in Ship-to Ship Operations, Alexander Meyer Sjøberg
13:00 – 13:15 WP2.6 Real-Time Teleoperation and Model-based Control of Cranes with Loads, Philipp Schubert
13:15 – 13:35 WP2 Panel Discussion: Olav Egeland (NTNU), Peder Sletfjerding (NOV),
13:35 – 14:30 Lab Demonstrators
14:30 – 14:45 WP1.2 Using Digital Hydraulics in Secondary Control of Motor Drive, Sondre Nordås
14:45 – 15:00 WP1.3 Using Digital Hydraulics in Secondary Control of Cylinder Drive, Viktor Hristov Donkov
15:00 – 15:15 WP1.4 Electrical and Electrohydraulic Linear Actuators, Daniel Hagen
15:15 – 15:30 WP1.5 Energy Saving Potential in Knuckle Boom Cranes Using a Novel Pump Controlled Cylinder Drive, Søren Ketelsen
15:30 – 15:50 WP1 Panel Discussion: Morten Kjeld Ebbesen (UiA), Torben Ole Andersen (AAU), Olav Egeland (NTNU) and Eivind Gimming Stensland (MacGregor)
16:15 Common Bus Transport to Kjevik Airport

The SFI Offshore Mechatronics Annual Report 2018 (PDF, 4.6Mb) is available at: https://sfi.mechatronics.no/wp-content/uploads/2019/03/SFI-OM-2018.pdf
Sondre Sanden Tørdal successfully defended his PhD thesis on March 19, 2019. The title of the thesis was: “Real-Time Motion Compensation in Ship-to-Ship Load Handling”. The title of the trial lecture was “Towards fully autonomous off-shore operation – Challenges and opportunities?” This PhD defence was the first in the research centre SFI Offshore Mechatronics and many more will follow in 2019 and 2020.

From left: Professor Jan Tommy Gravdahl (Opponent from Engineering Cybernetics, NTNU), Dr. Sondre Sanden Tørdal and Professor Svante Gunnarsson (Opponent from Division of Automatic Control, Department of Electrial Engineering, Linköping University).
The site visit as part of the mid-term evaluation of SFI Offshore Mechatronics took place at UiA Campus Grimstad, on March 14. The following participants were involved:
RCN representatives: Liv Jorunn Jenssen and Øyvind Veddeng Salvesen
Evaluation Panel:
Generalists: Professor Alison McKay (University of Leeds, UK, leader of evaluation panel) and Dr. Mary O’Kane (Emeritus Professor, Australia)
Experts: Professor Neil Duffie (University of Wisconsin-Madison, USA) and Professor Anders Robertsson (Lund University, Sweden)
10:00 – 12:00 Scientific Experts Evaluation session
Attendance:
1. Morten Kjeld Ebbesen (UiA, WP1 Leader)
2. Torben Ole Andersen (Aalborg, WP1 Leader)
3. Olav Egeland (NTNU, WP2 and WP4 Leader)
4. Geir Hovland (UiA, Centre and WP3 Leader)
5. Thomas Meyer (NORCE, WP5 Leader)
6. Baltasar Beferull Lozano (UiA, WP6 Leader)
7. Øyvind Haugen or Marianne Engvoll (GCE NODE, WP7)
8. Anne-Line Aagedal (UiA, Centre Management)
13:00 – 14:00 Meeting with PhD students (panel, RCN reps. and PhDs/Post.Docs)
1. Lothar Wöll (RWTH Aachen, PhD, WP5)
2. Yvonne Murray (UiA, PhD, WP3)
3. Atle Aalerud (UiA, PhD, WP3)
4. Andrej Cibicik (NTNU, PhD, WP2)
5. Luis Lopez (UiA, Post.Doc, WP6)
6. Martin Hemmer (UiA, PhD, WP5)
7. Njål Tengesdal (NTNU, PhD, WP4)
8. Sondre Nordås (UiA, PhD, WP1)
9. Søren Ketelsen (AAU, PhD, WP1)
10. Thiago Monteiro (NTNU Aalesund, PhD, WP3)
14:00 – 16:00 Generalists Evaluation session
Attendance:
1. Leif Haukom (GCE NODE and Centre Chairman)
2. Eivind Gimming Stensland (MacGregor and Member of Steering Board)
3. Peder Sletfjerding (NOV and main contact person for the WPs)
4. Asle Pedersen (Innoventus Sør and Centre Management)
5. Anne-Line Aagedal (UiA, Centre Management)
6. Geir Hovland (UiA, Centre Leader)
7. Michael Rygaard Hansen (UiA, Dean of Faculty)
8. Seunn Smith-Tønnesen (UiA, University Director)
9. Thomas Meyer (NORCE, WP Leader)
10. Geir Grasmo (UiA, Head of Department)
11. Sissel Eikeland (UiA, Communications Dept.)
The presentations given on March 14 are available for the centre partners, in ProjectPlace – WP0 Administration – Mid-Term Evaluation – Presentations
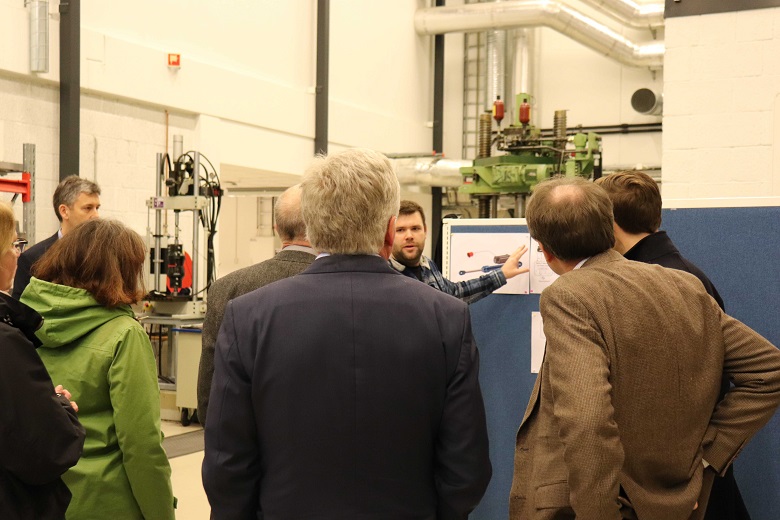
Below are some photos from the site visit:

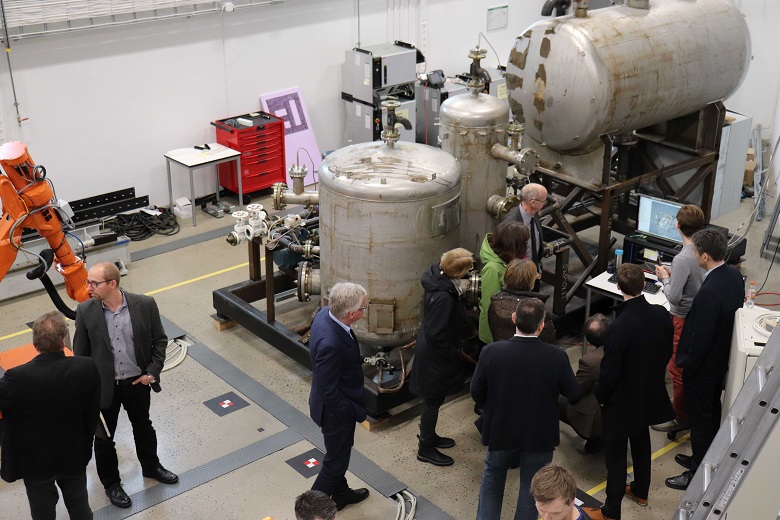
WP5 Leader Thomas Meyer presents the bend-over-sheave (BOS) machine for testing both steel and fibre ropes.

The four reviewers listen to the presentation of steel and fibre ropes testing.
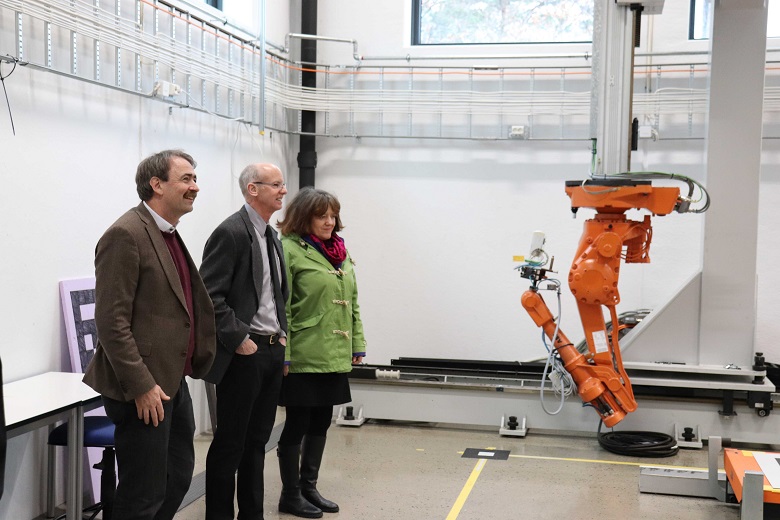
Andersson, Duffie and McKay in the point-cloud robotics lab.
PhD candidate Atle Aalerud giving a presentation of his work on real-time point cloud processing, obstacle detection and path planning.
PhD candidate Daniel Hagen giving a presentation of his work on a self-contained electro-hydraulic actuator.

University Director Seunn Smith-Tønnesen, Centre Chairman Leif Haukom and Centre Leader Geir Hovland after the mid-term evaluation site visit was completed.
The SFI Offshore Mechatronics robotic facility and work on GPU Voxels developed in WP3 by Atle Aalerud, Joacim Dybedal, Knut Berg Kaldestad and Geir Hovland have been referenced in the following PhD thesis: “Reaktive Bewegungsplanung auf 3D-Sensordaten mittels GPU-basierter Kollisionserkennung: Untersuchung von hochgradig parallelen Algorithmen für mobile Serviceroboter” by Andreas Hermann at Karlsruhe Institut für Technologie (KIT).
The thesis is available (in German) here: https://publikationen.bibliothek.kit.edu/1000085410 and SFI WP3 is mentioned on pages 219-220, Chapter 9.3 Ausblick: “Weit vorangeschritten sind die Implementierungen des SFI Centers für Offshore Mechatronik an University of Agder (Norwegen). Hier setzen Professor Geir Hovland und sein Team GPU-Voxels ein, um die Roboter auf zukünftigen autonomen Ölbohrplattformen abzusichern (siehe Abb. 9.1).”
Andreas Hermann visited UiA on March 13-14, 2018 and gave a guest lecture on GPU Voxels, see https://sfi.mechatronics.no/?p=1447.
KIT is one of the leading robotics institutes in the world, and they organised the number one IEEE international robotics conference in 2013, see http://www.icra2013.org.
New analysis methods for computer systems can prevent outages in the offshore industry. This will lead to both time and money being saved.
By Sissel Eikeland
Luis Miguel López Ramos is a postdoctoral research fellow and affiliated with SFI Offshore Mechatronics (SFI) and the Wisenet Lab at the University of Agder, where he researches signal and data processing.

Postdoctoral Research Fellow Luis Miguel López Ramos is affiliated with SFI Offshore Mechatronics at UiA.
The SFI which López Ramos is affiliated with is the largest research project ever led by UiA. The project period lasts from 2015 to 2023 and aims to increase cooperation between the business sector and prominent research environments.
Analysing Data
For the last two years, López Ramos has developed a data analysis method where an algorithm predicts future behaviour in a system based on previous behaviour. López Ramos’s algorithm can go through a large amount of data and calculate when an unexpected change may occur. The method can also reveal information about the location of the change point in the system.
“The information we get from predicting the behaviour of a time series of data signals may provide simple and comprehensible explanations for complex phenomena in oil and gas platforms,” López Ramos says.
Unconventional Procedure
Most of the projects in the SFI use a model-based procedure. That means trying to create a simulation model based on the laws of physics on a computer first. When making such simulation models, you often have to make some assumptions and simplifications.
“In López Ramos’s work, you do not need to make such assumptions, because a data-based procedure is used instead, ” Professor and SFI Centre Director Geir Hovland says.
By analysing large amounts of data from complex systems through the algorithm, correlations in data can be discovered that would otherwise not have been discovered by conventional procedures,” Hovland says.
The methods can be transferred to other fields
Data systems in the offshore industry are equipped with sensors which continuously monitor variables such as pressure, temperature and amount of oil flowing through the pipes. Still, it is not easy to know how the system will act at any given time.
“Oil and gas platforms have very complex systems. Technology that can discover behaviour that may lead to system errors will have a large significance for these platforms” López Ramos says.
Even though the SFI mainly helps the offshore industry with innovative mechatronics systems, López Ramos’s methods may be of great value for other fields as well.
“His methods are general and not specifically adapted to the oil and gas industry. Therefore, it is possible to transfer them to other fields. In the future, we hope that his algorithms also can be used within health services for treating patients, among other things,” Hovland says.
López Ramos will continue to work at UiA with fundamental research on mathematic modelling for two more years. He hopes that his research will lay the foundation for other types of methods for analysing data.
“I hope that in the future my methods can be of use to several sectors. In the course of this year, some of the methods should be ready for further development,” López Ramos says.

Postdoctoral Research Fellow Luis Miguel López Ramos from UiA is developing an algorithm that can go through a large amount of data and calculate when and where unexpected changes may occur.

The research centre SFI Offshore Mechatronics is organising its 5th annual conference on June 4-5, 2019. In connection with this conference the journal MIC will organise the 4th special edition on offshore technology within the fields of Modeling, Identification and Control.
The fields of primary emphasis by MIC are:
• Modeling: General methodology of modeling including choice of structure, model reduction, numerical aspects, systems for computer aided modeling, etc.
• Identification: General methodology including system structure, identifiability, convergence, numerical aspects, systems for computer aided identification, etc.
• Control: General methodology including system specification, derivation of control strategies, analysis of system properties such as stability, sensitivity, etc.
• Applications: Demonstration, by simulations or experiments, of applications of theory within the above fields to engineering, biological, economic, ecological, social, geophysical, agricultural systems and others.
MIC counts as publication level 1 in Norway, see https://dbh.nsd.uib.no/publiseringskanaler/KanalTidsskriftInfo.action?id=342649bibsys=false
All papers published in MIC are peer-reviewed. All papers will receive a permanent DOI number and a printed edition will be handed out at the conference. An example of a previous printed special edition of MIC is available here: http://www.mic-journal.no/print.asp
Submit papers to: editor@mic-journal.no. The submission deadline is April 5, 2019. Manuscripts must be prepared using the MIC template available at http://www.mic-journal.no/micauthors.asp
Declaration of Invention (DOFI) documents submitted by centre researchers since June 2018 will be awarded at the upcoming annual conference of SFI Offshore Mechatronics. DOFIs are submitted to the respective employer (NTNU, UiA, AAU and RWTH Aachen).
